
Wat is zoeken in troebel water?
Zoeken en bergen in troebel water verwijst naar het lokaliseren en bergen van objecten, bewijsmateriaal of personen in wateren met slecht zicht of troebel water. De term “troebel water” verwijst naar water dat troebel, modderig of anderszins ondoorzichtig is, waardoor het moeilijk is om onder water goed te zien.
Het is inherent gevaarlijk om door troebel water te navigeren. Onder het oppervlak kan het zicht variëren van een paar meter tot slechts enkele centimeters, en in sommige gevallen is het water zo donker of zo dicht met deeltjes dat je je hand niet eens kunt zien, zelfs niet op millimeters afstand van je gezicht.
In omstandigheden met gevaarlijk slecht zicht zijn zoek- en reddingsoperaties in troebel water extreem moeilijk uit te voeren. Omdat het onmogelijk is om de grenzen van het duikgebied vast te stellen, wordt de veiligheid een grotere zorg voor duikers die te maken krijgen met onbekende en potentieel gevaarlijke omstandigheden.
Zoekacties in troebel water worden doorgaans uitgevoerd door speciaal opgeleide duikers die gebruikmaken van diverse apparatuur, waaronder:
- Onderwaterverlichting
- Onderwatercommunicatiesystemen
- Onderwaterzoekcamera’s
- Sonarapparaten
- Op afstand bestuurbare onderwaterrobots (ROV’s)
- Speciale duikuitrusting ontworpen voor omstandigheden met slecht zicht
Dit soort missies wordt doorgaans uitgevoerd door professionele zoek- en bergingsteams, zoals politie, brandweer, hulpdiensten of organisaties die gespecialiseerd zijn in onderwaterberging. Het primaire doel van deze operaties is het lokaliseren en bergen van vermiste personen, bewijsmateriaal of objecten die verband houden met onderzoeken, zoals wapens of smokkelwaar, of andere incidenten die zich hebben voorgedaan in wateren met slecht zicht.

Uitdagingen bij zoek- en reddingsoperaties in troebel water
Zoek- en reddingsoperaties, en zoek- en bergingsmissies, kunnen ongelooflijk complex en moeilijk zijn, vooral in troebel water. Teams worden geconfronteerd met een reeks uitdagingen, waaronder, maar niet beperkt tot:
- Slecht zicht
- Tijdsbeperkingen
- Dieptebeperkingen
- Omgevingsfactoren
Slecht zicht
Omgevingen met slecht zicht kunnen extreem gevaarlijk zijn om in te navigeren, waardoor het vaak onmogelijk is om de parameters voor de duik te bepalen en duikers afhankelijk zijn van hun tastzin om het doelwit te lokaliseren. Dit brengt een hoog risico met zich mee voor de duikers, omdat ze onbekende objecten niet kunnen vermijden die hen onder water kunnen verstrikken en vastzetten, of letsel kunnen veroorzaken.
“Een van onze grootste problemen is dat, als er iemand onder water vermist is, onze duikers het water in gaan om te zoeken, maar soms zijn de gebieden waar ze naartoe gaan te gevaarlijk en kunnen we geen duikers naar gevaarlijke gebieden sturen”, aldus Mal Sherlock, penningmeester van LMSRS (Limerick Marine Search and Rescue Service).
Tijdsbeperkingen
Duikers hebben ook een beperkte tijd dat ze onder water kunnen blijven, evenals een beperkte diepte waarop ze kunnen zoeken. Werken in troebel water vereist nauwgezette en systematische zoektechnieken, wat betekent dat inspecties langzaam en methodisch moeten worden uitgevoerd, waarbij telkens kleine gebieden worden doorzocht.
De beperkte tijd op de bodem resulteert ook in een lage zoeknauwkeurigheid, legt extra druk op de duikers en is fysiek zwaar, waardoor deze missies emotioneel en mentaal nog zwaarder worden.

Dieptebeperkingen en omgevingsfactoren
Dit proces wordt herhaald totdat de missie is voltooid, omdat duikers een beperkte diepte kunnen bereiken en een beperkte tijd onder water kunnen doorbrengen voordat het nog gevaarlijker voor hen wordt.
Afhankelijk van de watertemperatuur en andere externe of omgevingsfactoren, zoals het weer, kan de tijd die duikers onder water kunnen doorbrengen zeer beperkt zijn. Als ze langer onder water blijven, lopen de duikers het risico op ernstige gezondheidsproblemen zoals onderkoeling of decompressieziekte. Door het gebrek aan duidelijke visuele referentiepunten kunnen ze ook geen richting en afstand tot objecten van belang bepalen, wat het risico op desoriëntatie en verdwalen in het zoekgebied vergroot.
De veiligheid van de duikers is van het grootste belang bij zoek- en reddingsmissies. Daarom is het zo belangrijk om alternatieve methoden te vinden die veiliger en efficiënter zijn voor iedereen. Het gebruik van ROV’s (op afstand bestuurbare onderwaterrobots) ter ondersteuning van de duikers is momenteel de best bewezen optie voor deze operaties.
Technologische vooruitgang in zoek- en reddingsoperaties in troebel water
Technologische vooruitgang heeft zoek- en reddingsmissies veel veiliger en effectiever gemaakt dan ooit tevoren. Hoewel het menselijk oog niet door troebel water kan kijken, biedt technologie mensen de mogelijkheid om te navigeren en doelen te identificeren in omgevingen met weinig tot geen zicht.
Sonars
Het gebruik van deze technologie heeft bewezen direct voordelen te bieden aan zoek- en reddingsteams. Door zich bijvoorbeeld uit te rusten met navigatiesonarsystemen, zijn hulpverleners en vrijwillige zoek- en reddingsorganisaties de voordelen van deze geavanceerde technologie gaan inzien. Sonar heeft geleid tot een hogere succesratio bij het vinden van verloren of achtergelaten objecten en tot het uitvoeren van veilige en effectieve bergingsmissies.
Dhr. Sherlock van LMSRS legt uit hoe hun Deep Trekker ROV, uitgerust met sonar, de ideale oplossing is in omgevingen met slecht zicht. “Wat het apparaat doet is werkelijk fenomenaal, en omdat we meestal te maken hebben met nul zicht, kan de sonar op de drone een schaduw over de zeebodem projecteren, waardoor we kunnen ontcijferen wat we zien door elementen van de schaduw te analyseren.”
Sidescan-sonarsystemen worden bijvoorbeeld meestal achter boten gesleept om een groot wateroppervlak te doorzoeken, of aan de romp bevestigd. Het hele gebied wordt dan verdeeld in een zoekraster. De zijwaartse scan wordt vervolgens over het hele raster bewogen en elk gebied wordt twee keer gecontroleerd om er zeker van te zijn dat de locatie volledig is verkend.
Zodra de zijwaartse scan het gebied heeft doorzocht, kunnen zoek- en reddingsteams interessante gebieden markeren waar hun doelwit zich mogelijk bevindt. Traditioneel worden duikers op dit punt ingezet en moeten ze door het troebele water navigeren in de hoop hun object te vinden. Met nul zicht moeten deze duikers op de tastzin vertrouwen om zich te verplaatsen en hun doelwit te lokaliseren, wat een zeer langzaam en moeizaam proces is.
“Als we duiken, kunnen we iets missen dat zich vlak naast ons bevindt, maar slechts een meter verderop. Deze drone doorbreekt die barrière van gemiste objecten,” legde de heer Sherlock uit.
Op afstand bestuurbare voertuigen (ROV’s)
Daarom worden op afstand bestuurbare voertuigen (ROV’s) steeds vaker gebruikt bij zoek- en reddingsmissies. Niet om duikers te vervangen, maar om in tandem te werken. Net als bij traditionele methoden kan de ROV, nadat de zijwaartse scan het gebied heeft doorzocht en interessante gebieden zijn geïdentificeerd, snel worden ingezet om het doelwit te vinden en te identificeren.
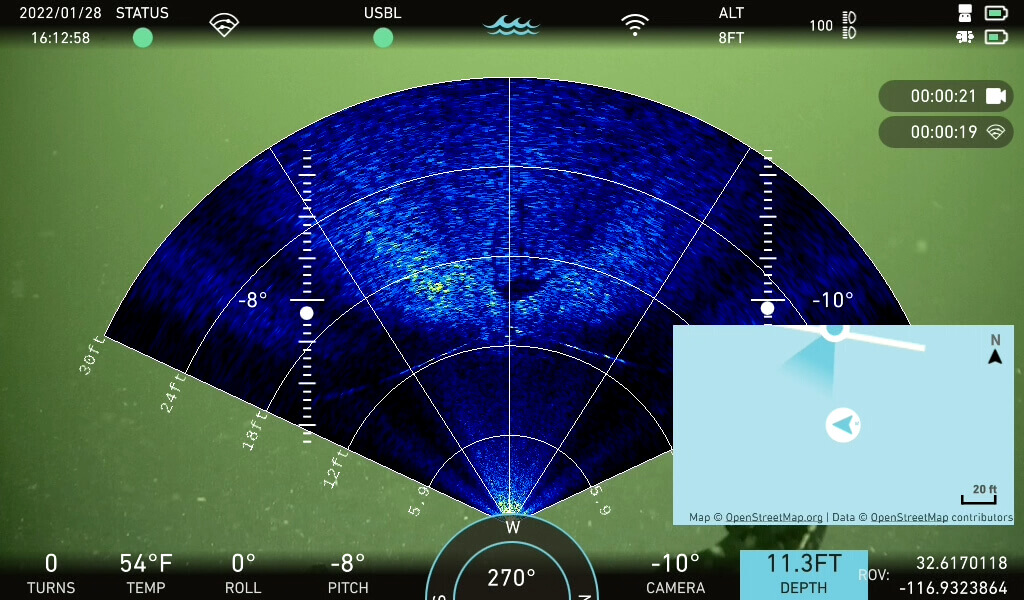
Bij een zoektocht in troebel water werkt de standaardcamera van de onderwaterdrone net als een menselijk oog; de zichtbaarheid is beperkt. Hier komen de multibeam-beeldvormingssonarsystemen van pas. Vanaf het oppervlak navigeert de ROV-piloot door het water met slecht zicht uitsluitend met behulp van het head-up display (HUD) van de sonar, vergelijkbaar met hoe een piloot op de instrumenten van zijn vliegtuig vertrouwt tijdens een vlucht door mist.
Piloten kunnen de locatie van de ROV ook in realtime volgen met behulp van USBL-positioneringssystemen en nauwkeurig manoeuvreren in lastige gebieden met behulp van DVL-stabilisatie en positiebehoud. Deep Trekker ROV’s beschikken bovendien over een intuïtieve missieplanner waarmee operators waypoints kunnen invoeren om een missieroute te plannen en uit te stippelen, of een pad kunnen creëren dat de ROV autonoom kan volgen. Hierdoor kunnen operators zich volledig concentreren op de sonarscan en de zoektocht.

Zodra de onderwaterdrone het doelwit succesvol heeft geïdentificeerd, kunnen duikers de kabel van de ROV rechtstreeks naar het doelwit volgen en het voorbereiden voor berging. Als het om een plaats delict gaat, kan de ROV het gebied vastleggen en documenteren ter ondersteuning van het onderzoek. Het allerbelangrijkste is dat de veiligheid van de duiker vanaf het oppervlak nauwlettend in de gaten kan worden gehouden tijdens de berging.
Het gebruik van technologie en hulpmiddelen zoals sonar en ROV’s is de beste manier om onvoorziene gevaren te vermijden en een veilige en effectieve uitvoering van de bergingsstrategie te garanderen. Dit houdt de duikers veilig en verbetert de efficiëntie en het succespercentage bij het vinden van doelwitten tijdens deze lastige missies.
Deep Trekker ROV’s voor zoekacties in troebel water
De Deep Trekker DTG3, PIVOT en REVOLUTION ROV’s zijn ontworpen als een echt draagbare oplossing. Dit is mogelijk dankzij de interne oplaadbare batterijen, waardoor het complete DTG3-pakket in één draagtas past en de Pivot en Revolution in slechts twee draagtassen.
De DTG3 werkt op batterijen en is draagbaar, waardoor zoekteams verder kunnen gaan dan een gewone duiker zou kunnen. Een oplaadtijd van slechts 90 minuten is voldoende om hem weer klaar te maken voor een nieuwe werkdag. Dit verlengt de mogelijke zoektijden aanzienlijk, veel langer dan met duikers en traditionele methoden, aangezien duikers slechts een beperkte tijd onder water kunnen doorbrengen.
Draagbaarheid van ROV’s is cruciaal tijdens een zoek- en bergingsmissie. Omdat wateren zich in sommige van de meest afgelegen gebieden ter wereld bevinden, is transport per vliegtuig of te voet soms de enige manier om er te komen. Omdat de Deep Trekker DTG3 in één Pelican-draagtas past, kan hij gemakkelijk worden vervoerd en ingezet in afgelegen gebieden.

Veelzijdigheid en aanpassingsmogelijkheden van Deep Trekker ROV’s
De onderwaterdrones van Deep Trekker kunnen worden uitgerust met een grijparm om een onderwaterobject op te pakken en naar de oppervlakte te brengen. Als het object niet direct kan worden opgepakt, kan er ook een karabijnhaak met touw aan de grijparm worden bevestigd.
Het juiste gereedschap voor de klus is cruciaal, en Deep Trekker ROV’s zijn ontworpen voor veelzijdigheid met modulaire integraties en aanpassingsmogelijkheden om aan uw specifieke missie-eisen te voldoen. De BRIDGE-software van Deep Trekker biedt volledig geïntegreerde oplossingen voor add-ons zoals beeldvormende sonars, positioneringssystemen en meer, allemaal op één plek.
ROV’s in combinatie met beeldvormende sonarsystemen behoren tot de meest nuttige hulpmiddelen voor zoek- en bergingsmissies in troebel water, waardoor omgevingen zichtbaar worden die zonder deze technologie niet toegankelijk zouden zijn. Met de draaibare kop van de Deep Trekker REVOLUTION ROV kunnen piloten zelfs de hellingshoek van de sonar aanpassen, waardoor het scannen van gebieden nog eenvoudiger en grondiger wordt.

Kosten- en tijdsbesparing van Deep Trekker ROV’s
Grote onderwaterrobots en reddingsapparatuur kunnen extreem duur zijn en veel voorbereidingstijd vergen. Veel van deze kosten kunnen worden vervangen door de aanschaf van één enkele ROV, en de onderhoudskosten van Deep Trekker-robots zijn aantoonbaar zeer laag of zelfs nihil, zelfs na jarenlang gebruik.
Hierdoor kunnen teams hun budget productiever besteden en hun tijd efficiënter gebruiken, waardoor er meer tijd overblijft voor de daadwerkelijke zoekacties en deze zo snel mogelijk kunnen uitvoeren.
Bovendien kunnen Deep Trekker ROV’s dankzij hun grotere dieptebereik grotere gebieden sneller doorzoeken dan duikteams. Hierdoor kunnen zoek- en reddingsteams missies veel sneller, grondiger en met een hoger succespercentage voltooien dan met traditionele methoden.
De bewezen kosteneffectiviteit en tijdsbesparing van Deep Trekker ROV’s ten opzichte van traditionele methoden maken ze de perfecte aanvulling voor hulpverleningsteams die in troebel water werken.
Voordelen van Deep Trekker ROV’s
Deep Trekker ROV’s zijn ontworpen om robuust genoeg te zijn om de zware omstandigheden onder water te doorstaan en leveren een indrukwekkend vermogen, verbeterde mogelijkheden en prestaties. Modulaire integraties zoals multibeam-beeldvormende sonar, USBL-positioneringssystemen en DVL-stabilisatie en -positiebehoud tillen deze mogelijkheden naar een nog hoger niveau, waardoor ze onmisbare tools zijn voor zoek- en reddingsmissies.
Als u hulp nodig heeft bij het vinden van de juiste technologie voor uw missies, neem dan contact op met onze robotica-experts. Zij helpen u graag bij het vinden van de juiste oplossing voor uw toepassingen en budget.




